
Fourteen projects involving 21 Nacogdoches High School seniors who are also members of the Stephen F. Austin State University STEM Academy displayed their work Wednesday, Dec. 17, during the Science and Engineering Fair held in the Malcolm Rector Center for Advanced Careers & Innovation.
Projects exhibited by students involved fields related to Animal Science, Plant Science, Microbiology, Materials Science, Sustainable Materials and Design, Engineering Technology: Statics and Dynamics, Systems Software, and Mathematics. Judges spent Wednesday afternoon asking questions about the students' research and outcome.
The projects represent the culmination of two years of work and are the students’ final assignment as graduating members of the STEM Academy.
Students prepared the following project abstracts:
Influence of Chinese Tallow on Mosquito Breeding Habitat Selection (Animal Science) – Owen Allen
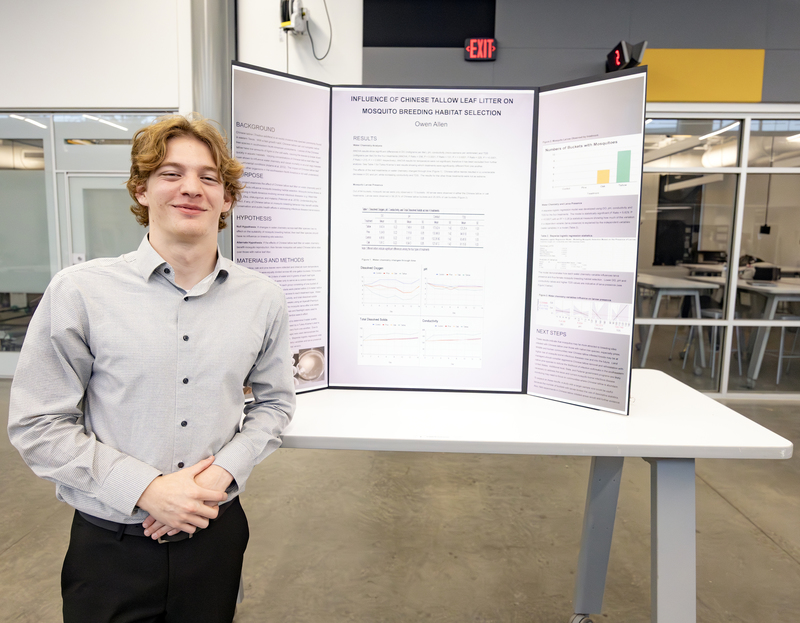
Chinese tallow (Triadica sebifera) is a rapidly growing, exotic deciduous tree from China that has become prevalent in southeastern North America. Chinese tallow outcompetes native tree species, which can be found around aquatic environments. Studies have shown that Chinese tallow leaf litter lowers pH and dissolved oxygen values in water.
This study investigated the effects of lower water chemistry caused by Chinese tallow on the selection of female mosquito breeding habitats. Using four different treatments consisting of water as a control, Loblolly pine (Pinus taeda), Swamp chestnut oak (Quercus michauxii), and Chinese tallow. Each treatment was surveyed for the presence of mosquito larvae.
Determining through an one-way ANOVA, Tukey-Kramer test, and stepwise regression, that Chinese tallow had the highest selection out of the four treatments, showing that Chinese tallow has an influence on breeding habitat for female mosquitoes.
Acid Rain Showdown: Alfalfa vs. Red Clover (Plant Sciences) – Alyssa Corpus and Dayanara Paez-Luna
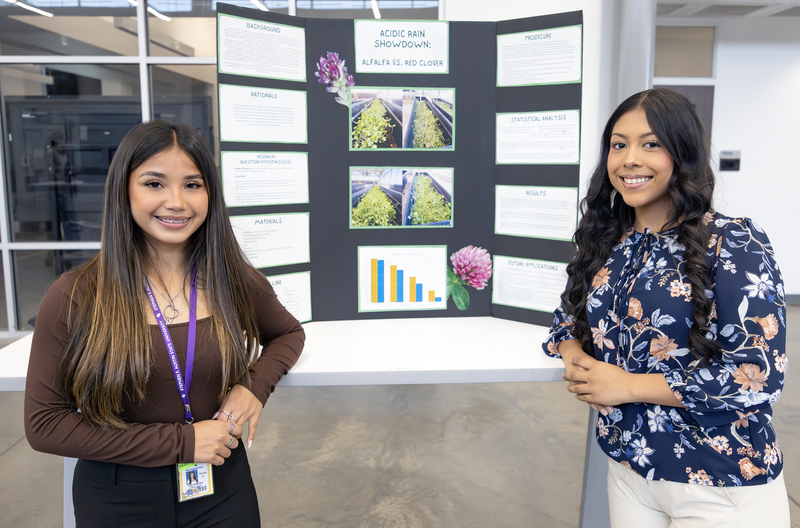
Acid rain is becoming a bigger issue for both agriculture and the environment, and this study aimed to understand how it affects plants that people rely on. This project compared Medicago sativa (Alfalfa) and Trifolium pratense (Red Clover) to see which is less affected by acidic rain better.
Growing conditions remained consistent across all plants, with identical greenhouse temperature, soil, and watering schedules. The hypothesis was that alfalfa would respond worse to acidic rain and grow more slowly than red clover.
By comparing the differences between the control and acidic groups, this experiment helps show how acid rain impacts plant growth in a realistic way and why understanding this matters for farming and environmental health.
Throughout the trials of this project that was conducted the observations revealed that alfalfa was less affected by the acidic treatment. Once the project was being done there were difficulties trying to gather data and information to be able to conduct the experiment thoroughly and effectively.
With that dilemma, it became difficult to find an alternative to which data could be accurate. Making due with the images taken, this experiment, going forward would need revision and more thorough research and thinking to make sure it is accurate.
Bacillus Goes Plastic (Microbiology) – Dylan Hinojosa and Joel Jones
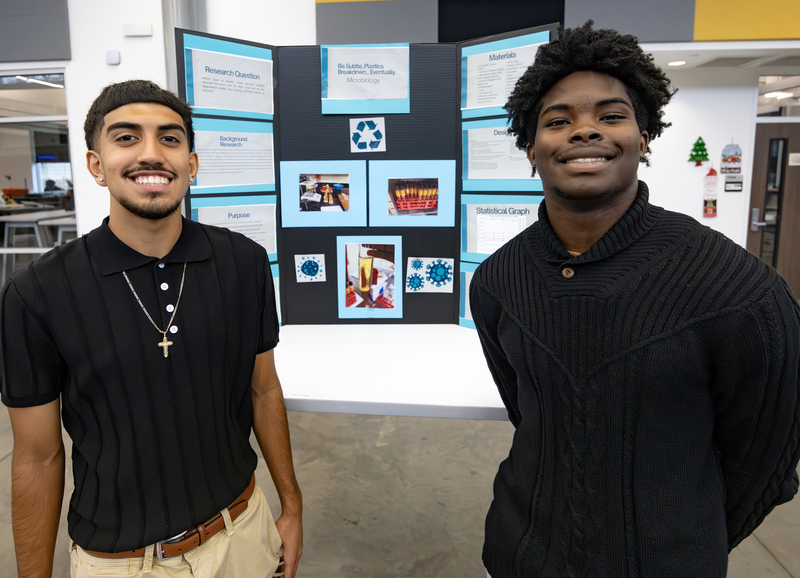
Plastic pollution remains a major environmental challenge due to the durability of conventional plastics. Microbial degradation offers a potential sustainable solution, and previous studies suggest that Bacillus species can break down tough natural polymers through secreted enzymes.
This project examines whether Bacillus subtilis can degrade polyethylene terephthalate (PET) and other common plastics over a 30-day period.
Plastic samples (types 1–7) were sterilized, cut to a uniform size, pre-weighed, and incubated in a minimal salt medium inoculated with B. subtilis. Mass measurements were taken weekly and compared with uninoculated controls.
The hypothesis proposed that B. subtilis would reduce the mass of plastics through microbial degradation. Results showed very slow but measurable mass loss, averaging about 0.0002 g per week across plastic types.
These findings indicate that B. subtilis can degrade plastics, but only at a minimal rate under the tested conditions. The study supports further research into microbial and enzymatic strategies for more efficient plastic degradation.
PVA Microcrystalline Citric Acid (Materials Science) – Axel Castro, Eli Hernandez
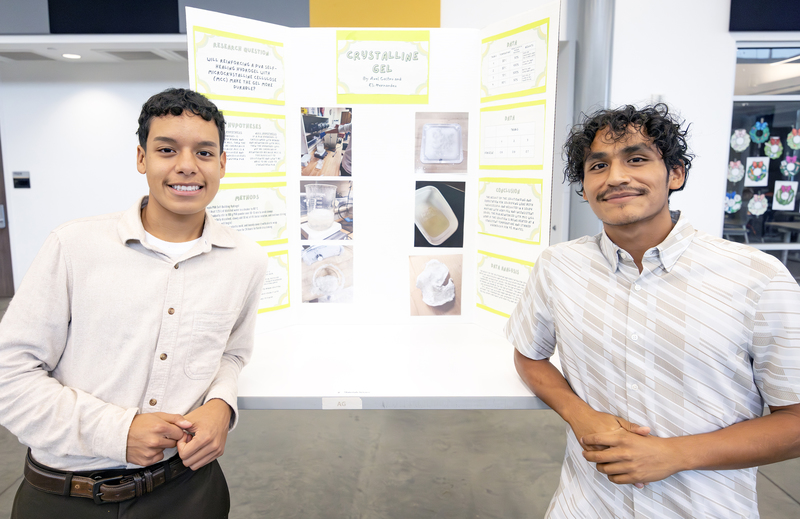
The nanocellulose, Microcrystalline Cellulose, was in theory assumed to be a functioning reinforcer for a Polyvinyl Alcohol hydrogel since other, more expensive and difficult to acquire nanocelluloses have been used in other labs. The polymer being used was Polyvinyl Alcohol, a common substance used for films.
The PVA’s biodegradability and water solubility capability are the reasons for the polymer’s common use. Microcrystalline Cellulose (MCC) is a common nanocellulose used as a bulking agent for food. PVA hydrogels are commonly reinforced by other nanocelluloses, and because MCC is a type of nanocellulose that was cheap and accessible, the only flaw is the solutionizing MCC struggles with. To solve this, a sonicator was used instead of stirring with a stirring rod. Using MCC as a reinforcement additive to PVA seemed logical and promising.
Citric Acid was used as a chemical crosslinker for PVA, and MCC was used in an attempt to solidify and combine both chemical compounds. Citric Acid is a positively working substance because of its non-toxic and biodegradable characteristics.
The attempt of making the simple, common, PVA hydrogel, excluding MCC, was successful and very fragile, considering .6 newtons was all that was necessary to pierce with a plastic spoon. The MCC and Citric Acid were added into the procedure and resulted in unsuccessful attempts 4 times.
The result of the solutionizing and expectation for solidifying both was unsuccessful and resulted in a soupy mixture with very few and inconsistent solids. The procedure was followed, unmodified, on the 1st attempt. On the 2nd attempt, the amount of borax was doubled. On the 3rd attempt, the amount of borax was increased by 500% and the temperature was decreased to 70°C, resulting in a very hard and brittle solid. In the 4th attempt, the temperature was increased to 90°C and resulting in a yellow soupy substance with very few and inconsistent solids.
Pom-Pom Packed Plastic: Pomegranate-Powered Biodegradable Plastic Film (Materials Science) – Paulina Carrillo, Sophie McClendon
This study examined the possibility of using lignocellulosic fibers obtained from pomegranate peels for the production of environmentally friendly plastic films that can safely be disposed of through the ordinary waste stream as a sustainable alternative to conventional polyethylene. Transforming a plentiful agricultural waste, pomegranate peel, which leads significantly to the mass and emissions of greenhouse gases in landfills, into a functional and eco-friendly packaging material was the goal. The suggested process adhered to previous research on the bioplastics based on banana and avocado using the same chemical extraction and film-casting procedures.
The research aimed at the separation of cellulose from the peels by means of alkaline and oxidative treatments, dissolving the purified fiber in a ZnCl₂ solution, and regenerating it into a thin, flexible film. The mechanical strength and biodegradability of the film were to be ascertained through tensile testing and a soil burial test of 30 days, respectively.
But, in spite of finishing up the preparation and pretreatment steps, it was not possible to get the cellulose-based plastic film made successfully. The testing for the various properties of the film could not be done because the film did not reach the final stage needed for testing and hence, the data on the properties could not be collected.
Although the experiment did not lead to the production of the plastic, it nevertheless raised the issue of the potential and the difficulties involved in transforming fruit-waste fibers into bioplastics.
The focus of the future study will be on the adjustment of chemical concentrations, on the modification of heating times, and on the optimization of crosslinking conditions to come up with a workable film. This effort will serve as a reminder of the importance of iterative design in engineering, and at the same time, it will set the stage for improving the process in the following trials.
Leather Re-imagined: Crafting and Testing SCOBY-based Leathers (Materials Science) – Myah Morrill
The global leather sector annually consumes over 23 billion square feet of leather, leading to a hefty economic value while posing environmental and health hazards due to the release of toxic chemicals. Amongst these chemicals are chromium compounds, formaldehyde, and a variety of heavy metals. Consequently, this project serves as a vehicle to explore how feasible it is to produce a sustainable, biodegradable animal leather alternative out of SCOBY (Symbiotic Culture of Bacteria and Yeast), which is a naturally derived cellulose biomaterial obtained from the fermentation of kombucha.
Material performance was evaluated by testing two different production techniques: (1) a calcium chloride-dried wool fiber–reinforced SCOBY composite, and (2) a beeswax-integrated SCOBY biocomposite aimed at improving the flexibility and water resistance. Under the given standard conditions, two SCOBY cultures were fermented, after which each of them was transformed into leather-like sheets and evaluated qualitatively for texture, appearance, aroma, flexibility, and durability as compared to real leather.
Findings from the two prototypical methods highlighted the impediments of the processing stages considerably, i.e., they encountered problems in mixture separation, hardening beyond the limit, uneven drying, and changeable SCOBY consistency as a result of fluctuating temperatures and natural biological variations. All of these problems collectively constrained the mechanical performance of the materials, thus making it impossible to achieve the production of a fully functional leather alternative. Error analysis shed light on a variety of factors that led to project failure, which, amongst others, include the excessive use of calcium chloride, poor mixture integration, and the growth and moisture content of SCOBY variation.
Nonetheless, the project reveals the promise of SCOBY-based biomaterials to substitute leather made from animals in an eco-friendly way. Some of the future measures suggested entail better environmental controls during fermentation, better mixing methods, using professional drying equipment, and replacing wool fibers with cutting-edge biodegradable polymers, not only for structural reinforcement but also for
Further work on these methods may yield more uniform material properties and thus foster the progress of sustainable, non-toxic leather substitutes.
Flaming Feathers (Energy: Sustainable Materials and Design) – Daniel Perez-Venegas and Billy Vermeulen
Current sources of fuel pose increasing problems to the population. Coal is non-renewable, expensive to mine, has a significant environmental impact, and produces large amounts of air pollution when burned. Wood, while renewable, can be expensive to harvest and process for energy and has a significant environmental impact due to deforestation.
An alternate fuel source, feathers, was investigated using bomb calorimetry, thermal gravimetric analysis, and FT-IR spectroscopy. Feathers generated 4962 cal/g when combusted compared to lignite coal, 5262 cal/g; and wood pellets, 4225 cal/g. The combustion of the feathers resulted in very little residual waste (99% mass loss) and produced carbon dioxide (major product) and nitrogen oxides (slight traces) as byproducts. This is comparable to the combustion of the wood pellets, with the same byproducts of combustion, but there was more residual waste with wood pellets (98% mass loss).
These results indicate that feathers are viable as a renewable fuel source, giving similar calorie content but reduced pollution to wood and coal, accompanied by a p-value of less than .0001; the results are statistically significant.
Iron Arm (Engineering Technology: Statics and Dynamics) – Logan Bates
Modern exoskeletons often rely on complex control systems that interpret muscle signals and predict user movements through onboard computation. While effective, these systems require extensive calibration and testing, and without refinement, they can produce inconsistent or jerky motion. This project addresses the problem by developing a simplified exoskeleton design that reduces control complexity while preserving the strength-assist benefits of traditional systems.
The purpose of this project is to create an exoskeleton arm that uses a differential force-sensing approach rather than predictive algorithms, enabling smoother and more reliable assistance with minimal computational overhead.
The mechanical frame was constructed using steel and aluminum components cut, drilled, and bent to form a hinged structure with cylindrical supports for the user’s arm. Assembly involved precise drilling for pivot points and bolting joints to allow semi-free movement.
The control system integrates an Arduino Uno, force-sensitive resistors (FSRs), a motor controller, and a linear actuator powered by a 12 V battery. Custom Arduino code reads FSR inputs, calculates differential pressure, and outputs RC signals to the actuator, ensuring proportional assistance while applying rate limits for smooth motion.
Testing demonstrated that the exoskeleton significantly reduced the effective load on the user. At an actuator capacity of 15 lbs, the user experienced only about 3 lbs of resistance, equating to an 80% reduction in lifting effort. When running a T test, a P value of less than .0001 was obtained, meaning the exoskeleton has less than a .01% chance of having done nothing. (>.05 out of 1 chance of meaning the project was unsuccessful).
Future implications include refining the design with stronger, faster actuators and optimizing sensor placement for improved responsiveness. Additionally, by inverting sensor logic, the system could serve as a stabilizing aid for individuals with muscle spasms or movement disorders. This simplified approach offers a practical pathway toward affordable, efficient exoskeletons for industrial and medical applications.
Arm Mounted Drill (Engineering Technology: Statics and Dynamics) – Ruben Palacio Jr.
The Arm-Mount Drill is a new type of drill designed to be used without occupying the user's hand and to be very portable. The new drill can be adjusted to different users' arms. One way is adjustable straps on the components housing that can be adjusted for different users' arm sizes.
The drill was made with a wire power source since it was not possible to find how to add a battery to the device. Also, this design uses less torque since too much torque would be a safety hazard.
This new drill design was made using parts of an old ordinary drill; the motor was used and has good heat resistance. Testing runs have shown that the new drill will not overheat to a point of dangerous heat that would harm the user. In the drilling testing phase, results showed that even with drilling different screws or hole drill bits, the drill could not drill into harder surfaces than a wooden plank, but on other materials, the drill worked.
The heat test was run for one hour, and over the hour, the drill heated up by 25°F, but after reaching the now-identified max of 85°F, the drill did not heat up anymore.
The new drill can do some jobs better than an ordinary drill, but in some other roles, the standard drill can be better in harder-to-drill jobs.
In the future, the next steps for the drill will be to add a battery to the device and also add the classic feature of a flashlight for dark areas. Overall, the test data suggests the drill stays thermally stable and performs reliably on light materials. However, the results also show that its torque is not high enough for harder surfaces, indicating the need for a stronger motor in future versions.
Inferno Recon (Engineering Technology: Statics and Dynamics) – Sawyer Phelps

The project consists of heat-proofing a drone that withstood temperatures up to 2000 degrees Fahrenheit for several minutes at a time. The drone is protected with a lightweight material called Skogar ht 2.0, and will act as a reconnaissance drone for firefighters covering larger indoor spaces.
The implications of lidar for a later project have been tested by keeping the lidar still and placing the material of choice, Skogar, with several different thicknesses. After finding out that lidar can see through the material perfectly, showing that lidar can be added to the drone in a future project for self-automated flying.
The materials were tested under a constant high-heat source. The Flir gun recorded the external temperature of the drone, which technically mimics the internal side, since the other side was on the heat source.
Once the most efficient thickness for the lidar and the insulation of heat was chosen, the machinability, or the ability to cut the material, was tested. The material of choice, Skogar HT 2.0, was applied to a cheap mock drone.
The drone flew over a fire that reached temperatures higher than those of a typical house fire. The drone was recorded with the Flir gun and after flying over the fire for an extended period of time at a very close range the first thing to melt was the plastic propellers, the drone experienced flame contact for a long period of time, and after the propellers were switched the drone then went on a second flight, the drones propellers melted again, and internal temperature of the drone was recorded to be around 60 degrees underneath the Skogar material, this means that the drones internal temperature was almost unbothered by the high heat contact with the implication of Skogar.
This proof of concept shows that if this drone has carbon fiber props like the fishermen's FD1 drone, it would last longer because the plastic in the propellers would wear out first. With this information, the Fishermen Fd1 drones are the perfect candidates, as they also feature a waterproof internal hull. The Skogar was then applied to this drone, along with the electric fluid, making it a highly heat-resistant drone with results similar to those of the proof-of-concept drone.
Pool Buddy (Engineering Technology: Statics and Dynamics) – Silvano Pasillas and Aaron Smith
Breaking in 8-ball pool is one of the most influential shots of the game; the optimal cue-ball position for maximizing break effectiveness has not been studied in a controlled, repeatable way due to human inconsistencies in aim, force, and spin.
The purpose of this study was to determine which cue-ball locations on a standard pool table generate the highest break performance, measured by the number of balls potted, using a fully mechanical robotic system designed for consistent shot delivery. To eliminate variation, we engineered a break-robot capable of applying the same topspin, velocity, and alignment across all trials.
A 3×3 grid of cue-ball starting positions was established, consisting of front, middle, and back rows combined with left, center, and right columns. For each of the nine positions, the robot performed 30 breaks; 15 aimed at the lead ball at the head of the rack and 15 aimed at the second ball. After each break, the number of balls potted was recorded, and average pot values for each position were calculated. Additional notes on rack spread and cue-ball behavior were documented to provide qualitative context.
The results showed a strong dependence between cue-ball placement and break effectiveness. Middle and back-row positions consistently outperformed front-row positions, suggesting that increased distance behind the rack allows for better acceleration, energy transfer, and strike stability. The top-performing position was middle-right, first-ball, which produced the highest mean number of balls potted. In contrast, second-ball breaks generally resulted in lower averages across nearly all positions, indicating they are less efficient for generating a powerful rack explosion.
These findings support the conclusion that optimal break performance is strongly linked to cue-ball placement and that precise positioning can strongly influence game outcomes. Using robotics allowed for highly controlled data collection, providing insights that are difficult to achieve through human performance alone. Future research could expand this study by testing smaller grid increments, exploring variable spin and speed combinations, analyzing cue-ball deflection patterns, or integrating computer-vision systems to evaluate rack dynamics more deeply.
Funny Foiling (Engineering Technology: Statics and Dynamics) – Coen Robinson and James Wright
Conventional hydrofoils suffer from a natural speed limit stemming from cavitation: an effect where the water above the foil boils and creates vacuum bubbles. These bubbles implode causing drag and damage over time to the foil.
Oblique wings are a theorized way to minimize cavitation among hydrofoils past a certain speed. This is because as the foil moves through the water, the sweep of the oblique foil doesn’t allow the cavitation to affect the foil as heavily.
We modeled a 70cm boat hull while using rc components to power the air props of the boat and modeled the masts and foils. The main foil can rotate to change the angle of attack while remaining straight.
The results show that the foil in the conventional position (perpendicular to the hull) accelerated faster but had an overall slightly slower top speed than the foil rotated obliquely.
Although the oblique foil had a higher top speed, the stability and controllability of the craft was greatly diminished as the flow of water over the foil is uneven. The oblique foil had a predisposition to yaw to the left as the test was ongoing and as such may be considered a confounding variable.
School Buddy App (Systems Software) – Armaan Rajani
School Buddy is a multi-functional communication app developed to centralize school announcements, messaging, homework partner matching, club announcements, and extracurricular activity planning into a single platform. This project evaluates whether improving app performance and design can increase user satisfaction across students, teachers, club sponsors, and school administrators.
The experiment used a two-phase testing method: participants used a base version of the app for two weeks, completed a mid-experiment survey highlighting how they felt about the app and any errors they encountered, then used an updated version of the app for two more weeks, and finally completed a post-experiment survey.
Key usability measures were analyzed using paired-samples t-tests to identify any significant improvements between trials, while additional data on “competitor” apps, such as Band or Remind, and their usage highlighted adoption limitations. Findings from this study aim to determine whether a unified platform can enhance school communication and identify the barriers to its real-world implementation.
Overall, the results demonstrated that usability improved for every user group after updates, with several measures exhibiting statistically significant improvements. However, low usage compared to existing applications proved that performance alone isn’t enough: School Buddy must integrate more deeply into established workflows to replace multi-platform communication. These findings highlight both the promise of a unified system and the necessary next steps for its practical implementation.
Mathematical Model for the Reintroduction of Mexican Grey Wolves into Texas to Combat The Feral Hog Population (Mathematics) – Malachi Anderson
This study used a Lotka–Volterra–based simulation framework to evaluate whether Mexican gray wolves could feasibly reduce feral hog populations in Deep East Texas, comparing two scenarios: a phased reintroduction model and a model beginning with the current estimated Mexican wolf population of 257 individuals.
Monte Carlo simulations over a ten-year period incorporated seasonal hog reproduction, predation rates, and logistic wolf growth limits to capture ecological variability. While both models demonstrated that wolves initially suppress hog numbers, each also revealed the same major limitation: given the extremely high starting hog population and their rapid reproductive cycle, the available prey base drives wolf numbers well beyond realistic territorial carrying capacities.
This inflated wolf boom is short-lived, ultimately leading to a population crash once prey availability becomes misaligned with the mathematically elevated wolf numbers. As a result, the model suggests that wolf-based hog control becomes ecologically unstable at landscape scales, not because wolves fail to respond to prey abundance, but because the sheer size of the hog population artificially pushes wolf numbers into biologically impossible ranges.
These findings highlight that while predator–prey equations can illustrate general dynamics, they risk producing exaggerated predator growth when applied to invasive species with extremely high reproduction rates, and therefore must be interpreted cautiously when informing wildlife management strategies.